
Snelle torque sensoren meten de motoren
Voorheen maakte Project MARCH gebruik van positiegeregelde motoren. Een gebalanceerd exoskelet vereist echter een meegaand systeem: dit betekent dat de motoren moeten kunnen meegeven en/of druk moeten kunnen teruggeven als reactie op hun omgeving. Daarom wilde Project MARCH voor het eerst gebruik maken van torque sensoren. Deze sensoren moesten het totale bereik van de motoren kunnen meten en vooral een hoge updatefrequentie hebben. Hoe sneller de sensoren zijn, hoe sneller er gereageerd kan worden op onbalans. De sensoren moesten ook passen in de bestaande motoren en gewrichten. Samen met Althen werden deze sensoren ontworpen voor zowel de lineaire als de roterende motor. Deze motoren simuleren de spierbewegingen van het menselijk lichaam en worden daarom gewrichten genoemd.
Eigenschappen van de sensoren
Het ontwerpproces van de sensoren had twee grote obstakels: de sensoren moesten een hoge updatefrequentie hebben en passen binnen de bestaande hardware- en softwarearchitectuur. Een zekere nauwkeurigheid was natuurlijk ook vereist, hoewel het vooral belangrijk was om grote verschillen per motor te meten. Uiteindelijk hielp Althen om sensoren te maken die pasten op een al bestaand onderdeel van ons exoskelet, binnenin de motorbehuizing. Voor de lineaire gewrichten was het mogelijk om een bestaande sensor op de spindel van de motor te plaatsen. Beide sensoren konden worden gekoppeld aan de rest van het systeem met een nieuw ingebouwd communicatieprotocol.
De as van de lineaire gewrichten en de motorkracht
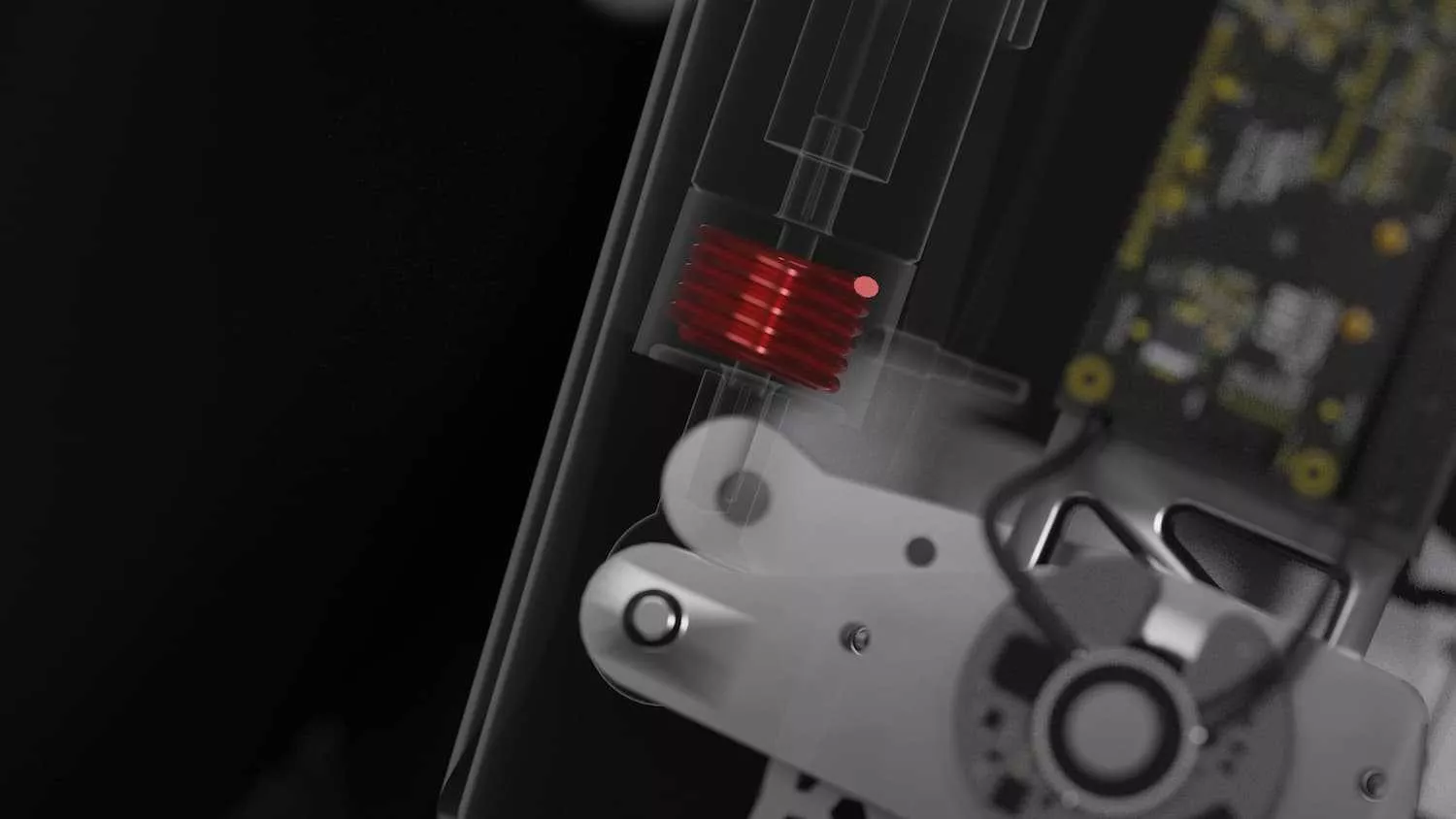
Althen leverde twee soorten sensoren: krachtopnemers en koppelomvormers. De krachtopnemers werden geïnstalleerd op de as van de lineaire gewrichten. De sensoren zijn snel te installeren, plug-and-play als het ware. De andere sensoren, de koppelomvormers, worden geïnstalleerd in het metalen deel dat de kracht van de motor naar de poot overbrengt. Om te beginnen met testen, moeten deze sensoren in de motor worden geplaatst. Project MARCH test de sensoren vervolgens afzonderlijk in een testopstelling: communicatieprotocollen, snelheden en afstelling van de sensoren vinden hier plaats. Op basis van de sensoren worden de motoren aangestuurd, dus de besturing wordt hier ook getest.
Voor het voorspellende algoritme waren veel sensorgegevens nodig, vooral informatie over de krachten op verschillende gewrichten. Met die vraag kwam Project MARCH naar Althen

Sensoren voor Project March
Miniatuur-diafragma-loadcellen en op maat gemaakte statische koppelsensoren
ATF311 Statische Torque Momentsensor
- Meetbereiken: 0 - 2 Nm tot 0 - 1.000 Nm
- IP65 Milieuverzegeling
- -10 tot + 80 °C Bedrijfstemperatuur
De sensoren testen
De voorspellende software die verschillende toekomstscenario's kan schetsen aan de hand van sensorinput; alle scenario's krijgen een score van hoe evenwichtig ze zijn en het meest evenwichtige scenario (d.w.z. met de hoogste score) wordt uitgevoerd. Project MARCH is nog in het beginstadium van het testen van de sensoren na het wachten op de levering, dus op dit moment zijn nog niet alle resultaten beschikbaar. Momenteel communiceert Project MARCH met de sensoren via het nieuw geïntegreerde protocol. Op dit moment starten de tests in de eerder genoemde testopstelling.

De sensoren in het exoskelet plaatsen
Dan is het tijd om de sensoren in het exoskelet te plaatsen. Zodra een motor (inclusief sensoren) volledig is getest in de testopstelling, kan hij in het exoskelet worden geplaatst. Maar voordat de gebruiker in het exoskelet kan stappen, moeten er nog meer tests worden gedaan. Eerst mag het exo vrij in de lucht bewegen, een zogenaamde airgait. Tijdens de airgait beweegt het exoskelet (uiteindelijk koppel gestuurd met nieuwe sensoren) in een looppatroon. Als dit goed gaat, kan het exoskelet een "grondgait" uitvoeren. Hierbij loopt het exoskelet weer in het eerder genoemde looppatroon, maar dan op de grond. Als dit allemaal is gebeurd, kan de gebruiker (of piloot zoals wij hem noemen) het exoskelet betreden.

Creactie van het exoskelet
Door gebruik te maken van de koppelsensoren van Althen is het voor het eerst mogelijk om een meegaand systeem te bouwen dat invloeden van buitenaf kan meten via sensoren. Met andere woorden, via deze sensoren kan het exoskelet reageren op input en onbalans van de buitenwereld, waardoor de MARCH 8 een van de eerste zelf balancerende exoskeletten ter wereld wordt. Project March heeft dit aan de wereld laten zien in de Exoskelet Reveal op 21 juli 2025. Wilt u meer weten over Project March, torque sensoren of load cells? Laat ons weten wat uw meetuitdaging is.
