
Lasertriangulatiesensoren en IMU
Althen ondersteunt onze ontwikkeling door meerdere zeer nauwkeurige sensoren te leveren. Delft Hyperloop gebruikt lasertriangulatiesensoren van Althen om de afstand tussen de pod en de baan te meten. Daarnaast integreren wij de inertiemeeteenheid (IMU) van ASC, ook geleverd door Althen. Deze componenten zijn cruciaal voor het bereiken van stabiele levitatie en nauwkeurige motorbesturing, met minimale vertraging.

Betrouwbare metingen in een omgeving met hoge EMI
Ons systeem vertrouwt op lasertriangulatiesensoren en een IMU voor nauwkeurige metingen en besturing. Een grote uitdaging was de overgang van analoge naar digitale uitvoer voor de driehoeksensoren. De overstap werd noodzakelijk vanwege de hoge elektromagnetische interferentie (EMI) in onze opstelling, waardoor de integriteit van de analoge signalen werd aangetast. Hoewel het herontwerp aanzienlijke systeemwijzigingen vereiste, verliep de overgang soepel. De prestaties van de digitale versie zijn vergelijkbaar met die van de vorige analoge opstelling.
Sub-millimeter nauwkeurigheid en snelle datarespons
Om een stabiel levitatiesysteem te behouden, moeten onze offset-sensoren sub-millimeter nauwkeurigheid leveren. De luchtspleet van de pod - de afstand tot de baan - varieert tussen slechts 3 en 20 mm, wat betekent dat elke decimaal telt. De geselecteerde sensoren moeten betrouwbaar werken binnen dit bereik, ongeacht het meetprincipe, zolang ze een hoge snelheid, nauwkeurigheid en betrouwbaarheid bieden. Tot nu toe hebben lasertriangulatiesensoren volledig aan deze eisen voldaan.
De IMU speelt ook een dubbele rol: hij ondersteunt levitatiebesturing en helpt simulatiemodellen valideren door kracht te meten. Hiervoor moet de sensor zowel snel als zeer gevoelig zijn, en tegelijkertijd een breed meetbereik hebben om krachten van verschillende grootten te kunnen verwerken.

Slimme sensorintegratie en overgang naar digitale gegevensoverdracht
- De 16 offset-sensoren worden rond de pod geïnstalleerd met behulp van op maat gemaakte 3D-geprinte beugels die aan het chassis worden bevestigd.
- Deze worden via RS485 aangesloten op een speciaal ontworpen printplaat en alle sensorgegevens worden via een CAN-bus naar de levitatiecontroller geleid.
- Voorheen gebruikten wij analoge output met een eenvoudige printplaat die alle datalijnen in één connector verzamelde. Deze werd aangesloten op ADC's in de levitatiecontroller, maar EMI-problemen brachten de betrouwbaarheid in gevaar.
Optimalisatie van snelle gegevensarchitectuur
- Het optimaliseren van de hogesnelheidsgegevensarchitectureng naar digitale uitvoer betekende dat we de gegevensverwerking van ons systeem opnieuw moesten bekijken.
- Elk van de 16 sensoren verstuurt gegevens met minimaal 1,5 kHz (idealiter 2 kHz), met 4 bytes per meting, wat neerkomt op ongeveer 50 kb/s per sensor of 750 kb/s in totaal.
- Wij hebben eerst overwogen om alle sensoren op een enkele RS485 bus aan te sluiten, maar bandbreedte- en identificatiebeperkingen maakten dit onhaalbaar.
- In plaats daarvan ontwierpen we een eigen RS485-bus per sensor. Alle bussen komen samen op één centrale printplaat die de gecombineerde gegevens verwerkt en via CAN doorstuurt naar de levitatiecontroller.
Wij zijn er trots op dat Althen een langetermijnpartner is voor ons project. Hun sensoroplossingen zijn zo betrouwbaar gebleken dat wij ze kunnen uitsluiten als een bron van fouten tijdens het oplossen van problemen, wat ons ontwikkelingsproces aanzienlijk versnelt.


Testen en afstemmen van de prestaties
- Na het bouwen van de printplaat voerden we geïsoleerde labtesten uit om de RS485-communicatie en sensorintegratie te valideren.
- Wij onderzochten de gegevensstructuren en parameterinstellingen van de sensoren en bevestigden dat de digitale interface een waardevolle upgrade was.
- De eerste tests lieten een vertraging van ~3 ms zien - te hoog voor onze 750 µs regelkring.
- Door sensorinstellingen zoals belichtingstijd en buffergrootte aan te passen, brachten we de latentie terug tot onder 750 µs, waardoor de vertraging gelijk werd aan die van de analoge versie.
- Deze optimalisaties, ondersteund door de gedetailleerde documentatie en interfacetools van Althen, waren cruciaal voor een succesvolle implementatie.
-
NauwkeurigheidHet uiteindelijke systeem levert een indrukwekkende meetnauwkeurigheid van 0,01 mm.
-
LatentieDe latentietijd is minimaal en komt nu overeen met of overtreft zelfs de vorige analoge opstelling.
-
Geen problemenEr zijn geen problemen met de nauwkeurigheid of afwijkingen geconstateerd, wat bevestigt dat aan alle verwachtingen voor prestaties en betrouwbaarheid is voldaan.

Precisie en prestaties gevalideerd in een praktijkdemo
In juli 2025 vertaalde dit zich in succes in de echte wereld: ons team werd het eerste studententeam ter wereld dat een live Hyperloop-demonstratie gaf op de 420 meter lange testbaan van het European Hyperloop Center (EHC) in Veendam - de langste Hyperloop-testbaan in Europa. Deze wereldprimeur betekende een historische mijlpaal in duurzame transportinnovatie. Dankzij de prestaties van onze pod en de betrouwbaarheid van ons sensorsysteem wonnen we met trots de overall prijs tijdens de European Hyperloop Week (EHW) - een erkenning van zowel technische uitmuntendheid als systeemgereedheid onder live omstandigheden.
Gebruikte sensoren
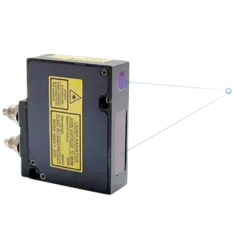
FDRF603 Series Laser Triangulatie Sensor
- Meetbereiken: van 2 mm tot 1.250 mm
- Universeel voor vele toepassingen
- 0,02% van het bereik/°С temperatuurafwijking
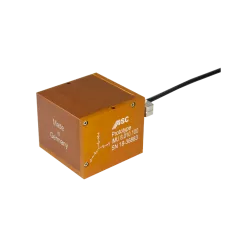
ASC IMU 8.X.Y tactische inertial measurement unit
- Tactische IMU met 6 DOF
- FOG-achtige prestaties, ARW <0,01 °/√u
- Modulaire accelerometer- en gyroscoopbereiken
Althen als betrouwbare partner in innovatie
Naast productkwaliteit blinkt Althen ook uit in service en ondersteuning. Vorig jaar repareerden ze snel twee beschadigde sensoren, die nu als nieuw presteren. Door hun reactiesnelheid en expertise zijn ze een onmisbaar onderdeel van ons succes - niet alleen dit jaar, maar ook de komende jaren.
Other hyperloop projects
Neem contact met ons op
voor uw project of meer informatie over lasertriangulatiesensoren en IMU's