IMU: Sichere Positionierung von Offshore-Schiffen ohne GNSS-Empfang
Projektbericht

Für hochgenaue Positionsbestimmungen in verschiedensten Anwendungen
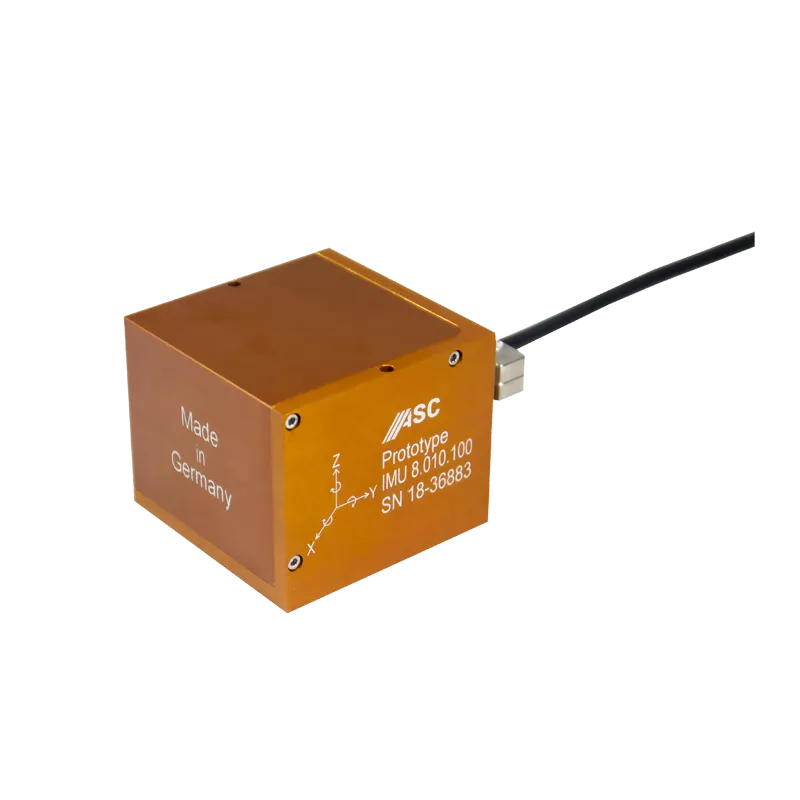
Die Inertial Measurement Unit ASC IMU 8.X.Y eignet sich ideal für hochgenaue Positionsbestimmungen in den verschiedensten Anwendungen. Die IMU 8 basiert auf der MEMS-Technologie und beinhaltet eine Reihe hochgenauer Inertialsensoren wie z. B. einen triaxialen Beschleunigungssensor und ein triaxiales Gyroskop. Aufgrund der hervorragenden Langzeitstabilität und des niedrigen Rauschens der Sensoren können Positionsänderungen in allen 6 Freiheitsgraden zuverlässig und mit hoher Wiederholgenauigkeit gemessen werden.
Die ASC IMU 8 verfügt über eine hervorragende Bias-Stabilität von 0.12°/hr und einen Angular Random Walk von lediglich 0,017°/√Hz. Ihr kapazitiver MEMS-Beschleunigungssensor ist in Ausführungen mit Beschleunigungsbereichen von ±2g bis ±30g erhältlich. Der Sensor bietet eine Amplitudenabweichung von <0,5% FSO und ein Signalrauschen von 7 µg/√Hz bei einem Messbereich von ± 2g.
Fordern Sie jetzt ein unverbindliches Angebot an oder senden Sie uns Ihre Kontaktdaten für eine unverbindliche und kostenfreie Beratung. Unsere Vertriebsingenieure setzen sich so schnell wie möglich mit Ihnen in Verbindung.
Nicht das richtige Produkt? Wir bieten Standard-Sensoren, helfen Ihnen aber auch gerne mit einem maßgeschneiderten Aufnehmer oder einer kompletten Messlösung weiter. Kontaktieren Sie uns einfach für eine kostenlose Beratung oder einen Kostenvoranschlag.
Kontakt| Spezifikationen | Wert |
|---|---|
| Measurement range (accelerometers) g | ±2 to ±30 |
| Measurement range (gyroscopes) °/s | ±10 to ±400 |
| Operating current consumption ma | <120 |
| Operating temperature range °c | -40 to +85 |
| Power supply voltage v | 8 to 30 |
| Storage temperature range °c | -40 to +100 |
| Weight (without cable) gram | 260 |